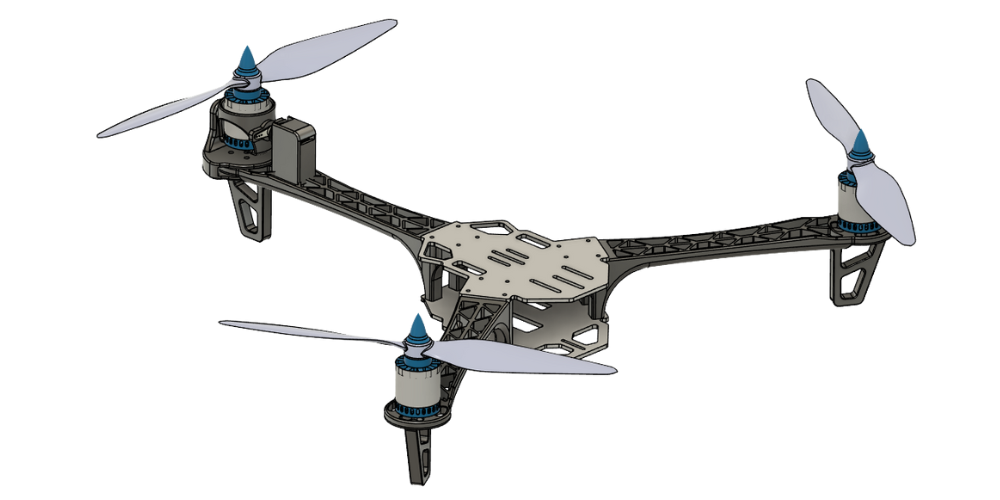
Tricopter Altitude Holding using LQR
Final project focused on designing, simulating, and validating a Linear Quadratic Regulator (LQR) control system for tricopter altitude stabilization. This work highlights transferable expertise in R&D, QA, QC, and engineering through modeling, implementation, and systematic testing.
LQR
MATLAB/Simulink
C/C++
Teensy 3.5